И нет, мы сейчас не о World of tanks или симуляторах. Мы говорим о реальных боевых машинах, которые одним выстрелом могут спокойно разнести дом. Почему заговорили на эту тему? А почему бы и нет. Танк - тоже самоходная машина, и им тоже как-то управляют.
Поэтому отвлечемся от реек и насосов и поговорим о системах управления движениями танков.
История танковых систем управления
Первым танком, который использовали в боевых действиях, стал британский тяжелый танк Mark I. Это произошло 15 сентября 1916 года во время битвы на реке Сомма. В первой в истории танковой операции участвовало 144 танкиста на 18 танках Mark I.
Первый британский тяжелый танк Mark I
С тех пор прошло больше 100 лет. За это время мировое танкостроение шагнуло далеко вперед, а каждое следующее поколение танков было мощнее, быстрее, крепче и опаснее предыдущего. Само собой, что системы управления танком также постоянно модернизировали и улучшали, чтобы добавить танкам маневренности, подвижности, устойчивости и проходимости.
Так как же выглядит рулевое управление танков? Сейчас узнаете.
Сразу уточним, что и в старых, и в современных танках нет рулевого управления в обычном понимании этой фразы. Нет или редуктора, нет электроусилителей или гидроусилителей руля.
Начнем с рулевого управления первых танков, таких как Mark I. Чтобы управлять первым британским танком, нужна была слаженная работа половины команды (т.е. 4-х из восьми членов экипажа):
- водитель танка переключал центральную механическую 2-х ступенчатую коробку передач и координировал работу остальных членов команды;
- командир танка управлял бортовыми тормозами;
- два помощника водителя отвечали за работу бортовых коробок передач.
Бортовые коробки передач и тормоза соединяли с ведущими задними колесами. Когда танк двигался прямо, оба колеса крутились с одинаковой скоростью за счет работы центральной коробки передач.
Чтобы развернуть танк, например, вправо, главный водитель переключал центральную коробку передач танка на первую скорость и давал команду на разворот в нужную сторону. Помощник водителя, который отвечал за работу левой бортовой коробки, переключал механизм на вторую скорость, чтобы левая гусеница начала двигаться быстрее правой, и танк начал разворачиваться вправо. Нужно повернуть влево? Второй помощник водителя увеличивал скорость движения правой гусеницы.
Когда танк заканчивал поворот в нужную сторону, помощники водителя переключали коробки на одинаковые скорости и выравнивали боевую машину. Бортовые тормоза использовали, чтобы уменьшить угол разворота и быстрее повернуть танк в нужную сторону. У первых танков не было заднего хода, поэтому чтобы поехать в обратном направлении, танк разворачивали на 180 градусов.
Прорывом стало рулевое управление танка Mark V, ведь управлять танком мог один человек. Mark V стал первым танком, в котором избавились от бортовых коробок передач, заменив их бортовыми фрикционами, и оборудовали полноценное рабочее место для водителя.

Трофейный британский Mark V на постаменте в Луганске
Теперь, чтобы повернуть танк в нужную сторону, водитель просто дергал за рулевые рычаги, которых было два - правый и левый. Рычаги отвечали за работу, соответственно, правой и левой гусениц. Нужно повернуть вправо? Водитель тянул правый рычаг на себя, правый фрикцион замедлял скорость движения правой гусеницы, и танк поворачивает вправо. К слову, на Mark V уже стояла не 2-х, а 4-х ступенчатая механическая коробка передач и теперь водитель мог лучше корректировать угол поворота на разных скоростях.
После первых удачных полевых испытаний рычажную систему управления начали использовать и в других танках. Британцы, французы, русские, немцы, итальянцы, шведы, американцы, японцы и китайцы устанавливали рычажную систему или ее модификации в свои танки. Конструкция системы настолько простая и неприхотливая, что советские танкостроители использовали рычаги для управления танками вплоть до 1980-х годов. Китайские и японские танки также долгое время оснащали только рычажными системами управления.
В то же время инженеры других стран постоянно работали над новыми системы управления боевыми машинами. Снова отличились британцы, которые в 1919 году провели первые полевые испытания танков с рулем, а не рычагами. Первыми танками с рулевым, а не рычажным управление, стали машины Vickers A4E11 и A4E12. Кстати, оба танка были плавающими.
В 1933 году уже советские ученые заменили рычаги на руль. Первым советским танком с рулем стал плавучий Т-37А. Однако, такая система управления была дороже и сложнее привычной рычажной. Поэтому в СССР от рулей в танках быстро отказались.
А вот союзники, а затем главные соперники СССР во Второй мировой войне оказались гораздо дальновиднее. Еще в 1930-тые годы немцы начали массовую модернизацию танков и других боевых машин. В результате немецкие танки стали первыми не плавающими танками, которыми управляли с помощью штурвалов, похожих на обычный руль. А самым популярным немецким танком с такой рулевым управлением стал Panzerkampfwagen VI Ausf. H1 или проще говоря "Тигр".

Отреставрированный немецкий "Тигр"
Органами управления "Тигром" были руль, педали газа, сцепления и тормоза, два рычага основного и вспомогательного стояночного тормоза, рычаг коробки передач. По бокам от сиденья устанавливали аварийные рычаги управления, которые использовали, когда основная система управления выходила из строя. По сути, чтобы научиться управлять танком, достаточно было уметь управлять автомобилем.
Теперь водителю танка, чтобы повернуть машину вправо или влево, нужно было просто повернуть руль в нужном направлении. Как и прежде угол поворота зависел от скорости движения танка. "Тигры" оборудовали 12-ти ступенчатыми коробками передач - 8 передач для движения вперед и еще 4 передачи для заднего хода. И хотя немецкие "полосатые" были очень тяжелыми, опытный механик-водитель мог развернуть танк на 360 градусов практически на месте. И все благодаря задним передачам. Во время разворота одна из гусениц двигалась вперед, а вторая - назад, чтобы обеспечить разворот на месте. Во время поворотов в движении одна из гусениц просто двигалась быстрее другой.
Немецкие тяжелые танки, которые строили после "Тигра", оснащали рулями. А во время Второй мировой войны немцы переоборудовали большое количество средних и легких танков, самоходных противотанковых и артиллерийских установок, и заменили старые рычажные системы управления на более совершенные рулевые системы.
Как вы думаете, кто еще догадался массово заменить старые рычаги в танках на руль? Нет, не британцы. Этими умниками стали американцы, хотя они пришли к такому решению намного позже немцев. Самым массовым американским танком со штурвалом был М4 "Шерман". Танки "Шерман" участвовали во Второй мировой войне и были намного подвижнее и маневреннее немецких тяжеловесов.

Американский Sherman M4A4 в одном из французских исторических музеев
Рабочее место водителя "Шермана" было оборудовано штурвалом, двумя рычагами тормозов (для правой и левой гусениц), педалью сцепления, рычагом 5-ти ступенчатой коробки передач, ручным стояночным тормозом, а также ножным и ручным акселератором. Рычаги тормозов были оборудованы сервотроником, которые выполняли роль усилителей. У МКПП было 4 скорости для движения вперед и одна задняя передача.
После Второй мировой войны большинство танков выпускали со штурвалами и рулями, а рычаги использовали только как аварийную систему управления для случаев, когда основная система управления выходила из строя. Со временем даже закостенелые русские и китайские танкостроители начали ставить в танках штурвалы вместо рычагов.
Современные системы управления танками
Сейчас большинство танков, которые стоят на вооружении стран мира, оборудованы модернизированными системами управления, но главным инструментом для поворотов машин был и остается похожий на автомобильный руль штурвал.
Яркий пример современной боевой машины со штурвалом - украинский танк БМ "Оплот", который входит в десятку лучших танков мира. Экипаж танка состоит из 3-х человек - командира, механика-водителя и наводчика. Место водителя танка "Оплот" оборудовано штурвалом, педалями газа и тормоза, рычагами 12-ти ступенчатой автоматической КПП и стояночного тормоза.

Полевые испытания украинского танка БМ "Оплот"
Французский AMX-56 Leclerc - еще один представитель танковой индустрии с отлично сбалансированной системой управления. К слову, французский танк считается одним из самых маневренных в мире.
Однако не стоит думать, что танковые инженеры остановились на достигнутом и до сих пор никто не придумал альтернативной системы управления танком. Одной из альтернатив танковым штурвалам могут стать... джойстики.
Начиная с 2013 года российские инженеры работают над новой системой управления для танка Т-90МС, которая позволит заменить штурвалы технологичными и высокоточными джойстиками. Такая модернизация позволит сократить количество экипажа до 2-х человек - командира, который также будет выполнять роль водителя, и наводчика. При этом в танке прозапас оставят оборудованное место водителя со штурвалом. Таким образом, если джойстик выйдет из строя, командир может пересесть на старое место водителя и продолжить управлять танком.
Так что, кто знает, возможно, современные геймеры, которые вовсю рубятся в танковые симуляторы на компьютерах и приставках, через 5-10 лет станут очень востребованными военными кадрами благодаря навыкам управлять виртуальными боевыми машинами с помощью обычных игровых джойстиков. Поживем - увидим!
На предвкушении сказываются и рассказы о могучих героях-танкистах Великой Отечественной войны, ворочающих Т-34 рычагами без гидравлики, и эпизодическая поездка «пассажиром» на громыхающей БМП.
В принципе, рассуждения верные: снаружи танк и вправду не может и не должен быть чистым, а хорошая спортивная форма оказывается кстати, когда хочешь аккуратно опустить свое тело в небольшой люк, не испачкав ногами сиденье. Однако более близкое знакомство с Т-72Б3 не оставило и следа от снисходительного скепсиса. Танк произвел на меня впечатление чрезвычайно сложной и в то же время хорошо продуманной машины. Уверен, что это самая надежная техника, которой мне приходилось управлять: кажется, сломать или испортить что-либо здесь человеку не под силу. Вместе с тем это и самая дорогая машина в моем послужном списке: танк можно было бы «сменять» на целый гараж роллс-ройсов.
Не верьте журналистам, которые жалуются, что в Lamborghini трудно садиться. Тот, кто научился аккуратно опускать себя в люк танка, запросто запрыгнет хоть в болид «Формулы-1».
Управление танком не сильно отличается от автомобильного: газ, тормоз и сцепление на своих законных местах, разве что вместо руля — рычаги. Хитрость в том, что еще до начала движения необходимо запомнить расположение всех органов управления и научиться находить их на ощупь. В походном положении механик-водитель высовывает голову из люка, диаметр которого едва превышает ширину плеч, поэтому ни рычагов, ни педалей, ни каких-либо рукояток или кнопок ему не видно. В боевом положении с закрытым люком в кабине тем более не осмотришься — темно.
Самый важный рычаг, который нужно уметь находить «с закрытыми глазами», управляет подъемом и опусканием кресла. Мне потребовалось немалое самообладание, когда на полном ходу в походном положении я вдруг провалился вниз и перестал видеть дорогу.



«Боевой» специфики машины никто не отменял: на педали сцепления и особенно тормоза здесь нужно давить изо всех сил, разгибая ногу в колене и упираясь пятой точкой в кресло. Зато 39-литровому дизелю абсолютно все равно, насколько плавно вы отпускаете сцепление, а средняя педаль чаще используется в качестве так называемого «горного тормоза»: если продавить ее почти до пола, срабатывает фиксатор. На равнинной местности «горный тормоз» служит отличным «ручником».
Заводится танк двумя кнопками: одна запускает масляный насос, а вторая — стартер. А дальше все привычно: выжимаю сцепление, включаю первую передачу, даю газу… Поехали!
На ходу танк… легок. Наушники неожиданно комфортного шлемофона оберегают уши и от шума, и от холода. По словам командира, с такой защитой даже стрельба из пушки не кажется громкой. Наверняка вы не раз слышали, что 2,5-тонные лимузины за счет большой инерции практически не замечают колдобин на асфальте. Представьте себе, насколько плавно плывет по грунтовке махина в 46 т. Конечно же, и на большой танк найдется большая канава, но наш тест прохождения серьезных препятствий не предусматривал.
 Простота управления танком — кажущаяся. Одно дело прокатиться по полигону, совсем другое — провести широченную машину по узкому следу минного трала или понтонному мосту, преодолеть брод, не похоронить аппарат в не замеченной вовремя канаве. Внедорожные способности танка не столь велики, как может показаться: траки траками, а 46 т никто не отменял. Современный танк — сложная боевая машина, у которой более 200 различных органов управления. Правила требуют, чтобы ремонт танка мог производиться силами экипажа, и это требование относится не только к конструкции машины (вес гусеничных звеньев, например), но и к квалификации бойцов. Так что до настоящих танкистов нам — как до звезды.
Простота управления танком — кажущаяся. Одно дело прокатиться по полигону, совсем другое — провести широченную машину по узкому следу минного трала или понтонному мосту, преодолеть брод, не похоронить аппарат в не замеченной вовремя канаве. Внедорожные способности танка не столь велики, как может показаться: траки траками, а 46 т никто не отменял. Современный танк — сложная боевая машина, у которой более 200 различных органов управления. Правила требуют, чтобы ремонт танка мог производиться силами экипажа, и это требование относится не только к конструкции машины (вес гусеничных звеньев, например), но и к квалификации бойцов. Так что до настоящих танкистов нам — как до звезды.
Рычаги управления на Т-72Б3 гидравлические, поэтому работать ими легко. У танка две одинаковые коробки передач (семь скоростей вперед и одна назад), каждая из которых приводит в движение свой гусеничный трак. Потянув на себя левый или правый рычаг, вы переключаете соответствующую коробку на одну ступень ниже. К примеру, если вы движетесь на первой скорости и тянете левый рычаг, левый трак останавливается, и танк поворачивает на месте с радиусом поворота, равным ширине машины. Если же вы едете на третьей передаче, то при повороте налево на левом траке включится вторая. Потянув оба рычага сразу, вы временно перейдете на вторую скорость.

Самое интересное в управлении танком — это то, что радиус поворота машины находится в жесткой зависимости от включенной передачи. Поэтому, для того чтобы ездить на танке быстро, требуется некоторая сноровка и глазомер. Заметьте, рычаги не притормаживают траки, а переключают передачи, поэтому поворот включается и выключается резко. Для автомобилиста это весьма непривычно.
Езда в боевом положении и вовсе напоминает старомодную компьютерную игру: в перископ видно область от левого до правого «крыла», «прицеливаться» помогает прочерченная центральная линия. К габаритам привыкаешь довольно быстро, а вот к посадке — нет: сидеть приходится, сильно наклонившись вперед. Распрямить спину с закрытым люком для механика-водителя непозволительная роскошь.
Компоновка танка Т-72 - классическая, с кормовым расположением силового отделения. Внешне Т-72 очень напоминает танк Т-64.
Кликните на изображение, чтобы посмотреть продольный и поперечный разрезы танка Т-72
Отделение управления танка расположено в носовой части корпуса по оси. Оно ограничено справа правым топливным баком и баком-стеллажом, слева - левым топливным баком, щитком контрольных приборов механика-водителя и аккумуляторными батареями с установленной над ними электроаппаратурой, сзади - вращающимся транспортером автомата заряжания. В отделении управления находится сиденье механика-водителя, перед которым на днище корпуса установлены рычаги управления, педали сцепления подачи топлива и привода стояночного тормоза, избиратель передач с элементами блокирующего устройства. В отделении управления, кроме того, находятся гирополукомпас, баллоны со сжатым воздухом и аппаратура воздушного запуска двигателя, часть боекомплекта спаренного пулемета, ящик для укладки в нерабочем положении прибора ТВНЕ-4ПА, бачок для питьевой воды, топливоподкачивающий насос БЦН-1, приборы системы защиты от ОМП и другие приборы и снаряжение.

1 - педаль остановочного тормоза; 2 - педаль сцепления; 3 - ручка стопора сиденья водителя; 4 - рукоятка привода ручной подачи топлива; 5 - гирополукомпас ГПК-59; 6 - топливораспределительный кран; 7 - защитная крышка АКБ; 8 - щит контрольных приборов механика-водителя; 9 -баллон для сжатого воздуха; 10 - выключатель батарей; 11, 19- сигнальные лампы выхода пушки за габариты корпуса; 12 - ручка защелки педали остановочного тормоза; 13 - сигнальная лампа блокирующего устройства: 14 - аппарат ТПУА-3; 15- прибор наблюдения ТНПО-168; 16 - плафон освещения; 17- сигнальные лампы датчика критической температуры охлаждающей жидкости и вызов командира; 18 - заправочная горловина бачка системы ГПО; 20 - клапан системы запуска двигателя; 21 - манометр; 22 - рукоятка крышки люка водителя; 23 - бак-стеллаж; 24 - рычаг избирателя передач; 25 - кожух для ТНПО- 168В; 26 - рукоятка привода жалюзи; 77 - рычаг управления; 28 - педаль подачи топлива; 29 - кран системы ГПО; 30 - вентилятор.
В подбашенном листе корпуса над сиденьем имеется люк механика-водителя. В шахте верхнего наклонного броневого листа установлен прибор наблюдения механика-водителя ТНПО-168 с системой гидропневмоочистки стекол, а по бокам от него - две сигнальные лампы выхода пушки за габариты корпуса. В днище корпуса за сиденьем имеется люк запасного выхода. Размещенный в отделении управления механик-водитель, несмотря на большой угол наклона верхнего лобового листа корпуса, во время боя занимает положение сидя, а не полулежа, как на некоторых западных танках. Это обеспечено установкой его сиденья в специальном углублении в днище.
Боевое отделение танка расположено в средней части корпуса и башне, и отделено перегородкой от силового отделения. Конструкция и компоновка танка обеспечивают переход членов экипажа из боевого отделения в отделение управления и обратно. В башне установлена 125-мм гладкоствольная пушка, автомат заряжания и приборы управления огнем. Справа от пушки расположено рабочее место командира, слева - наводчика. Справа на пушке установлен пулемет ПКТ, а над ее люлькой на крыше башни на специальных кронштейнах - базовая труба прицела-дальномера ТПД 2-49. Перед сиденьем командира и справа по борту башни установлены: электромашинный стопор пушки; пополнительный бак вертикального наведения; радиостанция Р-123М; аппарат ТПУ А-1; аппарат А-4 для подключения наружной розетки десанта; пульт загрузки автомата заряжания; карданный привод командирской башенки. У переднего бака-стеллажа на правом борту размещен баллон системы ППО.
В крыше башни над сиденьем командира расположена командирская башенка с люком, который закрывается крышкой, имеющей пластинчатый торсион. В командирской башенке установлены два прибора наблюдения ТНП-160 и командирский прибор ТКН-3. На башенке установлен зенитный пулемет НСВ-12,7. В корме башни расположен люк для выброса поддонов, механизм подъема кассет, досылатель и элементы привода крышки люка выброса поддонов. Перед сиденьем наводчика в башне установлены: прицел-дальномер с пультом управления автоматом заряжания; ночной прицел; прибор наблюдения; подъемный механизм пушки. Слева в башне установлены: распределительный щиток; индикатор количества выстрелов; аппарат ТПУА-2; механизм поворота башни с азимутальным указателем; стопор башни; электроприборы и приборы освещения. Люк наводчика закрывается крышкой, в которой имеется лючок для установки воздухопитающей трубы ОПВТ.

В средней части корпуса установлен вращающийся транспортер автомата заряжания с редуктором и стопором. Под полом транспортера на днище боевого отделения установлено вращающееся контактное устройство ВКУ-330-1. У моторной перегородки размещен средний бак-стеллаж с боеукладкой. Между ним и правым бортом установлен подогреватель двигателя с калорифером. Над подогревателем размешена фильтровентиляционная установка (ФВУ). Кроме того, в боевом отделении расположен еще целый ряд приборов и механизмов, в том числе термодатчики и трубопроводы с распылителями системы ППО.
Силовое отделение расположено в кормовой части корпуса танка. Компоновка силового отделения выполнена с поперечным размещением двигателя, смещенного к левому борту. Между двигателем и моторной перегородкой размещены: расширительный бачок системы охлаждения; центробежный масляный фильтр; поплавковый клапан расширительного бачка системы питания. Между правым бортом и двигателем установлен воздухоочиститель.

Вдоль правого борта установлена гитара, передающая крутящий момент от двигателя к коробкам передач. На отдельном постаменте фундамента двигателя закреплен стартер-генератор. Конический редуктор привода вентилятора установлен на кронштейне, закрепленном на днище танка. В специальных картерах, вваренных в кормовой части корпуса с левой и правой стороны, установлены планетарные коробки передач в сборе с бортовыми передачами. На кормовом листе корпуса расположен вентилятор системы охлаждения. В силовом отделении установлены пополнительный и основной маслобаки системы смазки двигателя, а также маслобак системы смазки и гидроуправления силовой передачи. Силовое отделение закрывается крышей, состоящей из крыши над двигателем и крыши над силовой передачей. По днищу корпуса проходят торсионные валы подвески, а по бортам танка - тяги приводов управления.
Корпус танка представляет собой жесткую коробку, сваренную из броневых листов. Он состоит из носовой части, бортов, кормы, днища, а также вентиляторной и моторной перегородок и крыши над силовым отделением. Носовая часть корпуса состоит из верхнего и нижнего наклонных броневых листов, сваренных между собой, а также с передним листом крыши, бортами и днищем. Верхний лобовой лист корпуса наклонен под углом 68° к вертикали и представляет собой многослойную комбинированную преграду (сталь - стеклотекстолит - сталь) толщиной 80+105+20 мм. Эта броня обеспечивала достаточно высокий уровень зашиты от наиболее распространенных в 1970-е годы 105-мм кумулятивных и бронебойно-подкалиберных снарядов. При существующем угле наклона по некоторым данным она эквивалентна стальной броневой плите толщиной 500-600 мм.

1 - верхний лобовой лист; 2,3 - скобы; 4 - кронштейн ограждения фары; 5 - передний буксирный крюк; 6 - нижний лобовой лист; 7 - кронштейн балансира; 8 - подбашенная защитная планка; 9 - отбойник; 10 - выпускной патрубок; 11 - кронштейн крепления бочек; 12 - камне-отбойник; 13 - кронштейн ленты крепления бревна; 14 - задний буксирный крюк; 15, 16 -кормовые листы; 17- картер коробки передач; 18 - упор; 19 - кронштейн поддерживающего катка; 20 - кронштейн амортизатора; 21 - кронштейн кривошипа направляющего колеса; 22 - грязевой щиток

К верхнему наклонному листу приварены два буксирных крюка с пружинными защелками, два кронштейна ограждения фар, трубки для подвода электропроводов к фарам и габаритным фонарям, скобы для крепления и укладки буксирных тросов, кронштейны габаритных фонарей. На верхнем листе крепятся два наклонных щитка для защиты смотровых приборов механика-водителя от попадания на них грязи при движении танка. В месте соединения верхнего наклонного листа с передним листом крыши по оси танка сделан вырез, в который вварена шахта для установки прибора наблюдения механика-водителя. Сверху шахта закрыта козырьком, приваренным к корпусу. К нижнему броневому листу толщиной 85 мм, наклоненному под углом 60°, приварены бонки для установки оборудования самоокапывания и минного трала.
Борта корпуса - вертикальные броневые листы толщиной 80 мм в передней части и 70 мм в задней. В средней части бортов вварены подбашенные защитные планки для увеличения внутреннего объема корпуса и установки башни. К бортам и наклонным листам носовой части приварены кронштейны кривошипов направляющих колес. К каждому борту приварено по три кронштейна поддерживающих роликов и по два отбойника, предохраняющих полки от ударов гусениц, по одному отбойнику для очистки гусениц от грязи и посторонних предметов. К бортам приварены полки, несущие на себе наружные топливные баки и ящики с ЗИП. К полкам крепятся пылевые щитки, передние и задние грязевые щитки. В задней верхней части левого борта вварена зашита выпускного патрубка, под которой находится патрубок для направления выпускных газов.

Корма корпуса состоит из кормового броневого листа, листа кормы нижнего и картеров коробок передач. В верхней части кормового листа справа и слева приварены трубки для подвода электропроводов к габаритным фонарям, кронштейны габаритных фонарей, кронштейны лент крепления бревна самовытаскивания и кронштейны крепления бочек. В нижней части кормового листа приварены два буксирных крюка с пружинными защелками и бонки для крепления запасных траков. В буксирных крюках выполнены сквозные отверстия для осуществления жесткой сцепки при буксировке танка.
Крыша корпуса состоит из переднего и заднего броневых листов и вставок над подбашенными защитными планками, приваренных к корпусу, а также съемной части. Днище корпуса имеет корытообразную форму и состоит из трех штампованных деталей. Для увеличения жесткости и размещения торсионов в днище выполнены продольные и поперечные выштамповки. В днище корпуса, кроме того, вварены кронштейны балансиров. Перегородка, отделяющая силовое отделение от боевого, приварена к поперечной балке, бортам и днищу. Вентиляторная перегородка выполнена в виде спирального кожуха со съемными передними и боковыми листами, в котором размещается вентилятор системы охлаждения. Основное назначение вентиляторной перегородки - организация потока воздуха к выходным жалюзи в целях обеспечения заданного расхода воздуха через радиаторы системы охлаждения.

Для зашиты бортов танка от кумулятивных средств поражения предназначены бортовые экраны толщиной 3 мм, выполненные из алюминиевого сплава. Четыре правых и четыре левых бортовых экрана крепятся к надгусеничным полкам и передним откидным щиткам. Для сохранности при движении танка по лесистой и пересеченной местности бортовые экраны могут быть установлены в походное положение - поджаты к боковым пылевым щиткам. В боевом положении они разворачиваются вперед под углом 60°.
Башня танка представляет собой фасонную отливку из броневой стали, к верхней части которой приварена крыша, а также правая и левая головки для защиты базовой трубы прицел-дальномера. Башня имеет монолитную конструкцию с переменной толщиной стенок. Толщина лобовой брони в секторе ±30° (по другим данным ±35°) от продольной оси танка составляет 400-410 мм при наклоне 10-25°. Толщина бортов колеблется в пределах 395-440 мм при углах наклона 20-25°. В передней части башни расположена амбразура для установки пушки. В амбразуре имеются две расточки, в которые обоймами, надетыми на цапфы люльки, устанавливается пушка. К боковым поверхностям амбразуры приварены дуговые щеки, которые в сочетании с проточками в подвижной бронировке пушки образуют лабиринт, препятствующий проникновению внутрь башни свинцовых брызг (осколков) и снижающий воздействие взрывной волны. Для крепления наружного защитного чехла пушки по бокам амбразуры приварены желобки, а ниже амбразуры - желобок со сливным отверстием.

Справа от амбразуры пушки в башне имеется амбразура для спаренного пулемета. Слева от амбразуры пушки приварены кронштейн для осветителя ночного прицела и трубка для подвода электропровода к нему (только на танках ранних выпусков). В передней части и на корме башни приварены крюки для захвата башни тросами при ее монтаже и демонтаже. Правее амбразуры пулемета приварен кронштейн фары и трубка защиты электропровода. К правой половине крыши башни приварено основание командирской башенки. В левой половине крыши башни вварены основание люка наводчика, фланец для установки ночного прицела, корпус для установки прибора наблюдения наводчика, а также выполнено отверстие для установки задней подвески прицел-дальномера. В верхней части кормы башни расположены люк для выброса поддонов, отверстие, в которое вварен фланец крепления антенны, резьбовое отверстие для монтажа розетки связи с десантом, кронштейн крепления фары.
Кроме того, в кормовой части башни приварены четыре кронштейна для крепления ящика ОПВТ, два кронштейна для укладки трубы ОПВТ и скобы для крепления брезента. По бортам башни приварены поручни для десанта. Башня устанавливается на шариковой опоре, верхний погон которой соединен с донным листом башни, а нижний погон крепится к крыше корпуса. Вращение башни осуществляется с помощью гидравлического и ручного механизмов поворота (МПБ). Гидравлический МПБ располагается в левой передней части корпуса машины, ручной - в башне, слева от места наводчика.
| < Назад | Вперед > |
|---|
ТЕХНИКА И ВООРУЖЕНИЕ № 4/2009, стр. 7-15
ОТ «ТЕЛЕТАНКА» К «ТАНКУ-РОБОТУ»
Михаил Усов
Окончание.
Начало см. в «ТиВ» №2/2009г.
После войны
Разработки и попытки боевого применения телеуправляемых машин в годы Великой Отечественной войны (например, «электротанкеток» ЭТ), как и их сравнение с германскими работами - тема особого разговора. Ограничимся упоминанием о том, что от широкого использования телетанков в ходе войны отказались, и взглянем, как происходило «возвращение к теме» после 1945 г.
Любопытен для нашей темы доклад, подготовленный НИИ БТ Полигоном ГБТУ в Кубинке по результатам испытанной здесь в 1946 г. модернизированной системы TOC-VIII на танке ОТ-34-85. Обоснование для проведения испытаний было следующим: «После минувшей войны осталось большое количество танков Т-34-85. С течением времени эти танки технически стареют, и может оказаться, что к началу новой войны они окажутся непригодными для использования их по прямому назначению... До минувшей войны у нас были телетанки и целые телетанковые части, но во время войны они использованы не были из-за сложившегося характера войны. В дальнейшем телетанковые части были расформированы и телетанки были использованы как обычные танки.
Основными недостатками прежних телетанков были: слабая броня, низкая проходимость и то, что телетанки были «слепы», т.е. при управлении телетанком нельзя было видеть перед ним местность на сколько-нибудь значительное расстояние.
Если в качестве телетанков использовать современные средние танки и снабдить их «глазами», т.е. телевизором для наблюдения местности на пути следования телетанка, тогда они могут стать грозным оружием». Телетанки на основе огнеметных танков ОТ-34-85 предназначались для нескольких целей. Предлагалось:
«1. Использование телетанков в качестве танков-снарядов (для подрыва важных объектов и укреплений).
2. Разведка огневых средств противника путем вызова на себя огня противника.
3. Проделывание проходов в минных полях.
4. Разведка и действия на местности, зараженной радиоактивными отравляющими веществами, и для других целей».
|

|
|
Общий вид передатчика. | Приемник ЮР. |


Использован был комплект аппаратуры TOC-VIII завода №192 выпуска 1938 г. Аппаратура была существенно переделана. В качестве танка управления оборудовали Т-26 (Т-26-5 или Т-26-Ш) телемеханической группы «Подрывник» - видимо, просто потому, что он был под рукой, хотя предлагалось использовать «любой другой танк» или автомобиль. Танк Т-26-Ш интересен тем, что, кроме безбашенной схемы, имел еще и подвеску по типу чешского легкого танка S-IIa «Шкода» (Ш-IIA, в серийном варианте LT-35): такая подвеска оказалась более надежной, чем штатная подвеска Т-26. Танк Т-26-Ш оснастили модернизированным «отправительным устройством», новым радиопередатчиком и перископическим прибором типа ПТК-1.

Пульт управления.
Телетанк, хотя и выполнялся на основе ОТ-34-85, имел ряд существенных отличий. Огнемет АТО-42, судя по приложенной к отчету фотографии, установили не в лобовом листе корпуса, как у серийных огнеметных средних танков, а в башне, справа от пушки (что вызвало соответствующие изменения в установке и маске пушки).
По командам с танка управления телетанк выполнял следующие операции: пуск двигателя, включение и переключение передач, остановка танка с затормаживанием, крутые и плавные повороты вправо и влево (в базовой аппаратуре TOC-VIII предусматривались только крутые повороты), повороты башни вправо и влево, огнеметание. Дальность управления объявлялась до 5 км. Телетанк мог действовать и с экипажем - для этого в нем установили такой же пульт управления, что и в танке управления, с автоматическим выполнением тех же команд.
В радиолинии управления вместо двух передатчиков (KB и УКВ, как в базовой аппаратуре TOC-VIII) использовалась коротковолновая танковая симплексная радиостанция ЮР с кварцевой стабилизацией частоты. По оценкам создателей новой опытной телемеханической группы, это повысило надежность и устойчивость радиосвязи и позволило упростить аппаратуру. Устаревшие лампы УБ-107 со стеклянной колбой, выпускавшиеся в 1930-е гг., заменили на лампы с металлическим баллоном: в субмодуляторе танка управления УБ-107 меняли на лампы 6К7 и 6Ф6, в дешифраторе телетанка - на лампы 6С5 (эти копии американской серии радиоламп выпускали в СССР в 1940-е гг.). Был добавлен ряд узлов для привода органов управления танка Т-34-85.
Как сообщалось в отчете, «после оборудования телетанк прошел 20-часовые ходовые испытания, которые показали надежность телеаппаратуры и достаточную его маневренность».
Полученный опыт использовался при разработке в начале 1960-х гг. телеуправляемых танков-мишеней (на базе Т-54).
Применение бронированных машин на Семипалатинском
ядерном полигоне
Как уже рассказывалось, во время Великой Отечественной войны телетанки не применялись - было попросту не до них. Не использовались они и в первые послевоенные годы, хотя в них была большая надобность. Можно вспомнить первые испытания ядерных зарядов, когда сразу же после ядерного взрыва 29 августа 1949 г. к центру опытного поля были направлены два танка, оборудованные свинцовой защитой для проведения радиационной разведки и осмотра центра поля (справедливости ради отметим, что и американцы при испытаниях своих первых ядерных зарядов использовали «экипажную» машину на шасси среднего танка).

В 1948 г. инженер-полковник A.M. Сыч (тогда заместитель начальника НИИ БТ Полигона) возглавлял подготовку бронетанковой техники для испытаний при первом атомном взрыве. По решению руководителя испытаний первой атомной бомбы академика И.В. Курчатова, была создана специальная группа, которой ставилась задача: на двух специально оборудованных танках Т-54 сразу после испытаний въехать в эпицентр взрыва, замерить зараженность воздуха и поверхности земли на глубине 10 см. Руководителем группы и водителем первого танка был А.М. Сыч.
Александр Михайлович являлся одним из самых эрудированных и осведомленных инженеров-танкистов и ему, как говорится, «сам бог велел» заняться телемеханизацией этих танков, но не тут-то было.
Как рассказывал позднее Александр Михайлович, их одели в белую одежду, академики Курчатов и Келдыш сообщили о том, что на участников этой операции уже поданы представления о награждении их орденами, а его - на звание Героя Советского Союза.
Танки выехали к эпицентру через 10 мин после взрыва. Были выполнены все предусмотренные программой работы. В итоге все получили награды, кроме Сыча, которому было отказано «как ранее находящемуся под следствием»...
По воспоминанию Ю.П. Павлова, участника испытаний БТТ на Семипалатинском ядерном полигоне, на нем, вплоть до моратория 1963 г. на наземные и воздушные испытания ядерного оружия, для замера зараженности воздуха и поверхности земли сразу же после ядерного взрыва применялись танки Т-54 (без башни, оборудованные свинцовой защитой от проникающей радиации). На них снаружи был смонтирован только простейший автоматический манипулятор для установки приборов радиационной разведки и снятия с них соответствующих показаний.
В танке находились люди, подвергавшиеся большой опасности, и никакой телемеханизации и роботизации, хотя для этого в то время были все условия и возможности. Возможно, займись тогда соответствующие управления специализированными дистанционно управляемыми машинами для работы в зонах повышенной радиации, СССР не пришлось бы во второй половине 1980-х гг. срочно закупать за рубежом мобильные робототехнические комплексы для работ при ликвидации аварии на Чернобыльской АЭС и создавать их у себя в срочном порядке.
Роботизация бронетанковой техники. Кубинка
Начиная с 1970-х гг. у нас применительно к бронетанковой технике стал использоваться термин «танк-робот» или «роботизированный танк». При этом имели в виду бронетанковое вооружение и технику (БТВТ), управление которой осуществлялось дистанционно или по заданной программе.
Это стало возможным, когда мо-торно-трансмиссионное и боевое отделение танка сделали максимально автоматизированными. Этому способствовало применение в танке автоматов заряжания вооружения, системы автоматического управления огнем (включая стабилизацию вооружения), планетарной трансмиссии (где фрикционные элементы работают в масле), различных сервомеханизмов в системе управления танком, надежных систем пневматики и гидравлики, а также компьютерной и вычислительной техники (ЭВМ) и т.п.
В 1980-е гг. интерес к роботизированным боевым и специальным машинам активизировался и за рубежом. С одной стороны, развитие вооружения и средств управления «расширило» поле боя и повысило опасность потерь личного состава при решении не только непосредственно боевых задач, но и задач боевого обеспечения: разведки, патрулирования, проделывания проходов в заграждениях, разминирования, технического обеспечения в боевой зоне. С другой стороны, микропроцессорная техника, позволяющая объединить высокое быстродействие и надежность с небольшими размерами и энергопотреблением, новая «математика» (программное обеспечение), емкие и помехозащи-щенные цифровые линии связи, аппаратура наблюдения высокого разрешения, точные и компактные гид-ро- и гидропневматические приводы и т.п. позволяли на практике реализовать требования, предъявляемые к безэкипажным машинам.
В частности, несколько безэкипажных бронированных машин различного назначения (разведывательные, носители вооружения, самоходные минные тралы) были разработаны по программе Центра бронетанковых войск США, а в 1990 г. в США приняли Объединенную программу роботизации. Впрочем, о танках-роботах и перспективе их развития написано немало. Лучше проследим развитие этого направления разработки бронетанковой техники на примере изменений структуры Полигона (Кубинка) и тематики его работ.
В 1972 г. Полигон был преобразован в 38-й научно-исследовательский испытательный институт бронетанковой техники (38 НИИИ БТТ МО), и в общем объеме его работ значительно увеличилась доля научно-исследовательской тематики. К наиболее важным событиям с начала 1980-х гг. можно отнести работы по исследованию и разработке методов и систем дистанционного управления танками (по этим исследованиям промышленности были заданы 24 опытно-конструкторские работы). Среди них:
Создание дистанционно-управляемого разведчика, оснащенного комплексом измерительной аппаратуры;
Внедрение радиотелеметрических методов регистрации параметров движения образцов БТВТ;
Создание дистанционно-управляемых мишеней-танков на базе САУ СУ-100, которые использовались на учениях «Запад-81». «Запад-83», «За-пад-84», а также «Осень-88»;
Оборудование системой дистанционного управления бронированной ремонтно-эвакуационной машины БРЭМ-1, которая использовалась при ликвидации последствий аварии на Чернобыльской АЭС для эвакуации кусков радиоактивных стержней и расчистки площадки после взрыва (в работах на Чернобыльской АЭС принимали участие Н. Д. Любишкин и другие сотрудники Института).
Сотрудники Института (В.Т. Новиков) в 1997 г. принимали участие в учениях СКВО по вопросу преодоления минных полей, в ходе которых применялось дистанционное управление.
При создании дистанционно-уп-равляемых танков использовалась система управления, разработанная в 38 НИИИ БТТ (отдел испытания трансмиссии и ходовой части) и применяемая на стенде управления трансмиссией.
Подобной системой управления была оборудована на Борисовском танкоремонтном заводе 121 машина СУ-100. На учениях Белорусского военного округа «Запад», проводившихся в 1981 -1984 гг. в условиях, приближенных к реальным боевым, эти самоходные установки использовались в качестве мишеней при оценке боевых возможностей ротного опорного пункта, усиленного артиллерией полка.
Команда на начало движения (включение главного фрикциона) подавалась с командного пульта (КП) по проводам, которые после начала движения обрывались, и далее танки-мишени двигались в автоматическом режиме.
Вот как рассказал об этом бывший начальник танковых войск, начальник ГБТУ МО СССР генерал-полковник Ю.М. Потапов:
«Крупное учение провел маршал
Устинов в 1981 г. в Белорусском военном округе. До начала учений, примерно за три месяца, он поставил мне задачу: на ремонтных предприятиях ГБТУ провести конструкторские мероприятия и создать танк, чтобы он заводился по радио, начинал движение и ведение огня без экипажа. При этом разрешил списать 100танков Т-34для использования их в качестве подвижных мишеней для ведения по ним огня с ходу на дивизионных тактических учениях. Нужно сделать так, чтобы все танки вышли в контратаку в одной линии на фронте не меньше 4 км. Для этой работы я привлек 482-й конструкторско-технологический центр ГБТУ, расположенный рядом с Киевским ремонтным заводом бронетанковой техники, и ремонтные заводы бронетехники Киева и Борисова, они же позже изготовили 120 танков-мишеней Т-34.
Учение проводилось с боевой стрельбой в Дретунском учебном центре, недалеко от Полоцка. Была создана для боевой стрельбы оборона противника - две линии траншей, закопанные реальные макеты-танки, орудия, пулеметные гнезда, для контратаки на третьей позиции и на левом фланге по отношению к направлению наступления двух дивизий были поставлены 100 танков Т-34, которые должны были контратаковать.
В дальнейшем предусматривалось форсирование р. Западная Десна и ведение боя с реальным «противником» - подошедшей дивизией с юга, после встречных боевых действий, пройдя свыше 250 км в направлении Минска, на полигоне Колодище, вблизи городка Уручье, было еще одно развертывание против обороны «южных», и завершено учение.
На учение были приглашены руководство Белоруссии, все командующие военными округами, командующие армиями, представители стран Варшавского Договора. Учение началось с реальной мощной артподготовки и ударов авиации по целям на первых двух позициях и переходом в наступление войск «северных» на фронте до 25 км. Мы наблюдали атаку 3 тд, которая, преодолев по гатям болото, развернулась и, ведя огонь с ходу, уничтожила реально поставленные танки-макеты и орудия в окопах, атаковала передний край. Артиллерия и авиация, вертолеты перенесли огонь в глубину. Мы вслед за атакующими переехали на наблюдательный пункт № 2. Я все время был рядом с маршалом Устиновым. Когда подошел второй эшелон дивизии, маршал волновался, получится ли контратака танков Т-34, ведь это была его идея. Я успокаивал его, что все получится. Когда левофланговый танковый полк подошел на уровень наблюдательного пункта, где находились мы, я дал команду «заводи», вдалеке, километрах в двух, одновременно появились дымки от заведенных двигателей и одновременно залп холостыми снарядами. Это было удивительное зрелище: увидеть одновременный залповый огонь из пушек, направленный в нашу сторону. Такое зрелище можно увидеть один раз в жизни, а может быть, никогда. Танки-макеты смогли сделать только один выстрел холостым снарядом, заряженным в стволе, больше выстрелов не было, так как мы не смогли сделать автоматического устройства перезаряжания орудия без человека, но и один выстрел произвел эффект на присутствующих. Контратакующие танки на первой передаче начали медленное движение на фронте 4 км против левого фланга дивизии. Атака была хорошо видна на всем ее фронте, так как местность позволяла это. Танковый полк и подошедший истребительный артиллерийский дивизион огнем с места начали уничтожать контратакующие танки. Постепенно, один за другим Т-34 были подбиты и остановились, некоторые даже загорелись.
Что интересно, один Т-34, сколько по нему ни стреляли, продолжал движение и уже вышел к нашему НП, когда уже нельзя было по нему стрелять. Он подошел вплотную к нам, но так как мы были на большом холме с крутыми скатами, танк пытался подняться. Ему это не удалось, видно, разное сопротивление под гусеницами повернуло его влево, и он пошел прямо к озеру, которое было рядом с НП, вошел в воду и некоторое время двигался, пока не утонул. Это было поразительное зрелище» (Потапов Ю.М. О жизни и службе в XX веке. - М.: Редакционно-издательский центр МО РФ, 2005).
Результаты этих учений использовались при дальнейших разработках противотанкового вооружения и тактики ведения боя. Авторы этой разработки были награждены орденами и медалями.
К концу 1980-х гг. в 38 НИИИ БТТ возникло несколько новых направлений работ. Среди них можно назвать следующие:
Исследование систем управления подразделениями тактического звена, при этом учитывались приданные, поддерживающие и взаимодействующие подразделения;
Разработка и обоснование программ развития и технического решения семейства новых боевых роботизированных машин, оценку эффективности боевого применения роботизированных комплексов и систем с элементами искусственного интеллекта;
Исследование эргономической системы «человек-машина».
Исходя из этого, в институте в 1988 г. сформировали отдел «Роботизации, систем управления, связи и эргономического обеспечения», который позднее был несколько переориентирован (лаборатория, занимающаяся эргономикой, в 1993 г. была передана в другой отдел) и стал с 1999 г. называться отделом «Роботизации и информационно-управляющих систем».
В разное время отдел возглавляли последовательно полковники А.А. Ильин, Е.И. Парфенов и В.К. Сынков. С 2005 г. отдел возглавил полковник В.В. Ветер.
Отделом были выполнены многочисленные работы, в том числе:
Проведены экспериментальные и теоретические исследования роботизированных образцов БТВТ;
Разработаны тактико-технические задания на ОКР по созданию систем дистанционного управления танком и другими образцами БТВТ;
Подготовлены методология и методический аппарат оценки эффективности применения технологий роботизации и дистанционного управления образцами БТВТ;
Разработаны предложения по технологиям и основным направлениям роботизации БТВТ, в том числе по использованию боевых роботов в составе общевойсковых формирований.
Сотрудниками отдела осуществлялось военно-научное сопровождение работ по роботизации образцов БТВТ и автоматическим системам управления (АСУ).
Результаты этих исследований использовались при разработке тактико-технических требований к перспективному танку.
Об одной такой разработке роботизированного танка Т-72, выполненной в 1990 г. в академии БТВ МО и в исследованиях которой принимал участие 38 НИИИ БТТ, расскажем подробнее.
Роботизированный танк Т-72. Академия БТВ
В конце 1980-х гг. в Военной академии БТВ по заданию Генерального Штаба ВС СССР выполнялась научно-исследовательская работа с целью определения возможности применения роботизированных и-дистанционно управляемых танков, для чего на базе серийных танков Т-72 были разработаны танк управления и роботизированный танк.
По решению начальника Академии генерал-полковника В.М. Гордиенко эти работы возглавляла кафедра «Вооружения и стрельбы» (кафедра №9). Ответственным исполнителем этой темы был назначен старший преподаватель кафедры, кандидат технических наук, доцент полковник Бындас Леонид Антонович.
Активное участие в этих работах принимали офицеры: старший научный сотрудник НИЛ-3, кандидат технических наук В.И. Сергеев, старший научный сотрудник НИЛ-4, кандидат технических наук С.С. Бабушкин, старший преподаватель кафедры №9, кандидат военных наук В.В. Лыков.
Научными руководителями этой тематики были начальники кафедры №9: в период 1980-1985 гг. - кандидат технических наук, доцент генерал-майор В.М. Шишковский, а с 1985 г. - доктор технических наук, профессор полковник Ю.П. Павлов.
Многие разработки по этой тематике проводились у нас в стране впервые и были защищены соответствующими авторскими свидетельствами (восемь авторских свидетельств получила Академия). Например, впервые в отечественном танкостроении в дистанционно управляемых танках в  приборах наблюдения и прицеливания применялась волоконно-оптическая техника.
приборах наблюдения и прицеливания применялась волоконно-оптическая техника.
Вот что вспоминает полковник Л.А. Бындас о развитии этих работ:
«Эффективность использования огневых возможностей танков на поле боя в значительной степени зависит от их способности совершать маневры, а также обнаруживать и быстро уничтожать противотанковые средства противника огнем как одиночных танков, таки в составе подразделений.
Учитывая важность этой задачи, в Академии БТВ с начала 1970-хгг. начали проводить исследования по вопросам автоматизации процессов управления танками.
В 1982 г. в Академии опубликован итоговый отчет по НИР «Автоматизация процессов управления огнемтанков и танковых подразделений». Совместно с кафедрой вооружения и стрельбы из танков в исследованиях по этой теме принимали участие специализированные предприятия Миноборонпрома, а также Московский институт электронной техники (МИЭТ) и Московский институт радиоэлектроники и автоматики (МИРЭА).
На основе теоретических исследований было проведено обоснование путей сокращения времени и повышения точности целеуказания в танковых подразделениях. Обоснованы тактико-технические требования к централизованной системе дистанционного целеуказания (ЦСДЦ), а также разработана ее функциональная схема. Расчеты основных узлов и блоков системы проверялись методом натурного макетирования в лабораторных и полевых условиях.
Результаты испытаний показали реальную возможность создания предложенной системы целеуказания в масштабах танкового взвода(роты). При этом время перенацеливания линейных машин сокращалось до 1 -5 с, тогда как при существующем способе подачи команды через командира подчиненного танка общее время целеуказания составляло 90 -100 с. При двухступенчатой передаче команды от командира роты командиру взвода и далее командирам танков - время целеуказания увеличивалось до 120 -140 с.

Таким образом, для резкого сокращения времени целеуказания необходимо было исключить операции, в которых участвуют члены экипажей танков. Эту задачу и решала предложенная нами автоматизация процессов передачи информации о координатах обнаруженной цели и поиска ее на подчиненных (линейных) машинах, а следовательно - скорейшего ее уничтожения.
В ходе практического решения задачи разработки системы автоматического дистанционного целеуказания было установлено, что выбранный принцип построения системы обладает более широкими возможностями. Так, например, способность разработанной системы быстро и точно сосредоточить огонь подразделения по одной цели позволяет существенно повысить зенитную защиту танков, что особенно важно для их успешной борьбы с вертолетами противника.
Полученные характеристики ЦСДЦ (временные, точностные, массогабаритные) показывали перспективность ее применения при решении задач управления огнем артиллерийских подразделений батальонного звена (самоходные артиллерийские орудия «Нона-СВ») и др.
Кроме того, заложенные в системе возможности служили реальной основой для разработки автоматизированных систем обнаружения огневых средств противника по траекториям выпускаемых ими снарядов.
В дальнейшем, с 1982по 1990г., научно-исследовательская работа нашего коллектива была направлена на обоснование и создание опытного образца автоматизированной системы управления огнем и движением танков (АСУ-ОД).
Первая часть работы состояла в том, чтобы обеспечить дистанционное управление танками взвода (роты) в боевом порядке без экипажей по командам, задаваемым командиром подразделения из укрытия или другого танка.
Для экспериментальных работ был использован танк Т-72. Кроме аппаратуры, используемой в описанной выше ЦСДЦ, танк был оборудован телевизионными камерами наблюдения за полем зрения прицела и смотрового прибора механика-водителя, а также исполнительными приводами на систему наведения вооружения (по двум координатам), автомат заряжания и органы управления танком (рычаги, коробка передач, подача топлива и главный фрикцион).
Реализация всех алгоритмов управления осуществлялась с помощью бортовой вычислительной машины танковой информационно-управляющей системы (ТИУС).
Командир танка находился в укрытии и на экране телевизионного монитора видел поле зрения прицела и панораму местности в приборе наблюдения механика-водителя. Воздействуя на соответствующие кнопки управления, командир танка осуществлял наведение оружия на цель, подавал команды на выбор типа снаряда и стрельбу, а также управлял направлением и скоростью движения танка.
Все команды управления осуществлялись с помощью приемо-передающего канала на частотах в диапазоне 30 -42 МГц. В этом случае при совместной работе телекодовой системы и передатчика бортовой радиостанции танка типа Р-123М вероятность приема информации целеуказания в условиях помех достигала уровня 0,9.
В ходе испытаний танк Т-72 (без экипажа) успешно преодолевал на полигоне расстояние до 2 км, при этом в ходе движения танка осуществлялась стрельба штатными снарядами по целям на удалении до 3 км. Всего в ходе испытаний было произведено 20 выстрелов и поражено при этом 15 целей.
Следует отметить, что применение АСУ-ОД позволяет существенно повысить надежность боевого применения танков. Экспериментальный обстрел танков на учениях «Запад-81» показал, что при попадании в танк даже нескольких снарядов аппаратура и агрегаты танка продолжали функционировать, тогда как экипаж, как правило, выходил бы из строя после первого же попадания снаряда противника.
Последнее обстоятельство способствовало тому, что с 1987г. наши усилия были сосредоточены на обосновании и создании макетного образца полностью «роботизированного» танка, который решает на поле боя боевые задачи без участия экипажа или оператора. В настоящее время макетный образец такого танка находится на территории 38 НИИИ БТТ.
Результаты проведенных по данной тематике исследований опубликованы в журнале «Вопросы оборонной техники» серия VI-1981 г., девяти отчетах по НИР за 1981 -1987гг., атак-же защищены авторскими свидетельствами №163119 от 27.1180 г., №187201 от 25.03.81 г., №184677 от 08.02.82 г., №190137 от 14.06.82 г., №209124 от 12.09.83 г., №220930 от 25.06.85 г., №237942 от 09.01.85 г., №253056 от 04.05.87г.».
Как видим, создание мобильных роботизированных безэкипажных боевых систем во многом опирается на уже достигнутые успехи в автоматизации ряда процессов в «экипажных» боевых бронированных машинах. В частности - на использование автоматизированных систем управления огнем и танковых информационно-управляющих систем.
Но вернемся к роботизированному танку на основе Т-72. В 1990 г. в учебном центре Академии БТВ (район г. Солнечногорска) танк управления и роботизированный танк были представлены руководству Сухопутных войск во главе с заместителем Главкома Сухопутных войск генералом армии М.М. Зайцевым Докладывал и руководил показом полковник Ю.П. Павлов.
Роботизированный и дистанционно управляемый танк позволял решать ряд задач по боевому применению, эксплуатации и ремонту танка и профессиональной подготовке личного состава. Рассмотрим эти задачи.
I. Задачи боевого применения:
Автоматизированное управление огнем взвода и роты;
Управление огнем и движением танка одним членом экипажа;
Движение и ведение огня по предварительно заданной программе без участия экипажа;
Самоокапывание танка по предварительно заданной программе;
Дистанционная постановка танка в окоп;

Движение по дну реки без экипажа с заданным курсом и скоростью;
Ведение разведки безэкипажным танком с целью выявления засад, мин, определение переправ и грузоподъемности мостов;
Проделывание проходов в минно-взрывных заграждениях;
Эвакуация из-под огня противника поврежденных объектов бронетанкового вооружения и техники.
Эти направления были выявлены еще при разработке в Военной академии БТВ концепции «атакующего бронированного эшелона» для прорыва современной, преимущественно противотанковой обороны.
II. В области эксплуатации и ремонта определились возможности решения следующих задач:
Автоматизация всех операций по подготовке комплекса вооружения к работе и запуску двигателя;
Поддержание заданной средней скорости, дистанции, курса и оптимального расхода топлива;
Диагностика, прогнозирование моторесурсов объекта на день боя, определение исправности систем и агрегатов;
Переход от планово-предупредительной системы обслуживания к обслуживанию по потребности за счет выявления объективного состояния систем и агрегатов.
III. В области профессиональной подготовки личного состава танковых подразделений и частей оценивались возможности решения следующих задач:
Сокращение стоимости и сроков подготовки экипажей;
Максимальное приближение условий тренировок к реальным;
Получение объективной оценки по большому числу контролируемых параметров;
Применение адаптивных программ обучения.
Основным звеном роботизированного танка являлась бортовая вычислительная машина комплекса ТИУС. Программа бортовой цифровой вычислительной машины заводилась с помощью пульта программиста и фотосчитывателя.
Информация по управлению движением танка передавалась на расстоянии с другого танка (танка управления) , либо с пульта управления через штатную танковую радиостанцию типаР-123М.
Принимаемая информация передавалась на дешифратор и через дешифратор и устройство сопряжения поступала в память бортовой цифровой вычислительной машины. Бортовая цифровая вычислительная машина анализировала полученную информацию и через устройство сопряжения выдавала соответствующие команды на управление движением танка (блок управления движением) и управление огнем танка (блок управления вооружением).
Для организации режимов движения и стрельбы танка-робота по памяти в соответствующих заданных направлениях и оптимизации режимов управления огнем и движением в полярной системе координат на танке устанавливался блок гироскопических датчиков (на башне).
Дистанционное управление роботизированным танком осуществлялось либо с пульта, установленного на другом танке, либо с неподвижного пункта управления со своим пультом. Аналогичный пульт управления огнем и движением танка устанавливался и на роботизированном танке - на случай действия экипажа на танке.
Управление движением осуществлялось путем автоматического перемещения рычагов и педалей с помощью блока исполнительных механизмов, размещенного за спинкой сидения механика-водителя. Для наблюдения за дорогой на роботизированном танке устанавливалась телевизионная камера, передающая поле зрения прибора механика-водителя на танк управления.
С помощью передатчика канала технического зрения через телевизионную камеру по радио на танк управления передавалась также изображение поля зрения прицела наводчика роботизированного танка.
Блок исполнительных механизмов был собран из штатных танковых электроприводов лючка выброса поддона и других элементов автоматических систем танка.
Пульт управления содержал два ряда индикаторов:
Верхний ряд информировал о тех командах, которые были поданы либо на расстоянии с другого пульта, либо с этого пульта;
Нижний ряд информировал о реальном положении органов управления.
Управление движением танка могло осуществляться либо в простом режиме, когда каждый орган управления перемещается после подачи специальной команды на этот орган управления, либо в автоматическом режиме по программе, заложенной в ТИУС.
Для переключения режимов работы пульта управления с «огня» на «движение» оператором (командиром) использовался специальный тумблер. При включении тумблера передавалась команда управления курсом и скоростью движения танка, при выключении передавалась команда управления оружием. Пульт управления включал небольшую рукоятку типа «джойстика», а также ряд тумблеров и кнопок. Пользуясь ими, оператор управлял курсом и скоростью движения танка, а также его оружием.
Для начала движения оператор (командир) переводил переключатель управления движением в положение «вперед». Выполняя программу «трогание», танк плавно, но с максимальным ускорением начинал движение. Специальным тумблером устанавливалась необходимая передача (например, четвертая). Перемещая рукоятку пульта «вперед» или «назад», оператор придавал танку желаемую скорость движения, которую танк поддерживал после отпускания рукоятки. Для изменения направления движения оператор изменял положение рукоятки «вправо» или «влево». Программа остановки танка выполнялась после перевода рукоятки в исходное положение.
При дистанционном управлении оружием роботизированного танка в режиме «огонь»:
Отклонение рукоятки «влево» и «вправо» означало поворот танковой башни «влево» или «вправо»;
Отклонение рукоятки «вперед» означало перемещение ствола пушки (пулемета) «вниз», т.е. придание желаемого угла склонения;
Отклонение рукоятки «назад» означало перемещение ствола пушки (пулемета) «вверх», т.е. придание желаемого угла возвышения.
Кнопки маслозакачивающего насоса и рычага пускового клапана использовались в режиме «огонь» как кнопки стрельбы из пулемета и пушки соответственно. Кнопка тумблера включения горного тормоза в режиме «огонь» использовалась для измерения дальности: включение - измерение дальности, выключение - «обнуление» дальности.
Дистанционное управление исполнительными механизмами и агрегатами роботизированного танка проводилось с пульта управления:
Одним человеком с места командира танка,
Оператором с танка управления, который следовал за безэкипажным роботизированным танком (оператор находился на месте командира танка),
Оператором с неподвижного пульта управления.
Самое большое впечатление сегодня производит демонстрация выполнения роботизированным танком в режиме дистанционного управления боевой стрельбы. Подается команда на запуск двигателя (программа выполнялась в течение 8 с). Подана команда на движение «вперед». Танк прибывает на рубеж открытия огня. Подается команда на остановку танка. Огонь ведется оператором с удаленного от танка пульта управления. Оператор, наблюдая на мониторе (телевизионном экране) поле зрения прицела, наводит пушку в цель, измеряет дальность до цели, дает команду на заряжание оружия. Пушка приводится на угол заряжания, идет поиск, досылание снаряда, заряда. Оружие заряжено. Выстрел. Цель поражена. Работает автомат заряжания, осуществляя автоматическую зарядку оружия: снова проходит досылание снаряда, заряда, и цикл заряжания окончен. Система вновь приведена в готовность к стрельбе. Огонь из пулемета также ведется с дистанционным управлением при движении танка - «сходу». Цели поражены.
В учебном лагере Академии провели также боевые стрельбы из роботизированного танка без экипажа, когда какая-либо связь с танком извне исключена, т.е. танк должен был действовать по программе, заложенной в его бортовую цифровую вычислительную машину. Ведь в реальных условиях, как показал опыт боев на Ближнем Востоке (операция «Буря в пустыне»), радиосвязь легко может быть нарушена.
Экипаж танка из двух первоклассных специалистов (а возможность разместить экипаж в танке-роботе была предусмотрена изначально) предварительно прошел всю дистанцию полигона и выполнил запланированные стрельбы, а сигналы действия их на органы управления движением и стрельбой были заведены в память бортовой вычислительной машины танка.
О деталях подготовки стрельбы наблюдающих не информировали. В назначенный срок на учебном полигоне Академии люки роботизированного танка без экипажа были запломбированы. Для запуска систем управления танком разрешено было воспользоваться только пультом, аналогичным автомобильному брелку-пульту включения системы центрального замка с автозапуском двигателя. Танк-робот без экипажа и внешней связи прошел всю трассу и успешно выполнил стрельбы. Как позднее рассказывал Ю.П. Павлов, эффект для многих был неожиданным.
Нужно отметить, что руководство Минобороны и, в частности, Главком Сухопутных войск генерал Армии В.М. Семенов в начале 1990-х гг. выражали большую заинтересованность в продолжении этих работ. В Академии НИРовские работы по этой тематике были фактически прекращены. Однако на Полигоне работы с роботизированными танками продолжились и направлены были в основном на миниатюризацию элементов системы, их современное техническое исполнение и установку системы на серийные танки.
За опытно-конструкторские разработки роботизированного танка брались МВТУ им. Н.Э. Баумана (в «Бауманке» было сформировано Специальное конструкторско-технологическое бюро прикладной робототехники) и ВНИИ Транспортного машиностроения (бывший НИИ-100 Миноборонпрома). Но денег для поддержки этих разработок в стране не оказалось. Да вскоре не стало и самой страны - СССР, где были начаты столь многообещающие работы в интересах Вооруженных Сил. Правда, создавались машины-роботы для других силовых ведомств. Бауманцы, например, создали серию мобильных робототехнических комплексов (МРК) для ФСБ, МЧС и Минатома.
Остается надеяться, что нынешняя Россия, с трудом преодолевающая тяжелое наследие «рыночных реформ» 1990-х гг., все же сможет продолжить работы по роботизации боевых бронированных машин.
Подготовил к печати Семен Федосеев
Завершая данную статью, хотелось бы привести рассказ о работах над безэкипажным танком-роботом в Военной академии БТВ бывшего заместителя начальника Академии по научной работе генерал-лейтенанта Н.Г. Орлова:
«Однажды зашли ко мне начальник научно-исследовательской лаборатории НИЛ-4, полковник Степан Билык и его сотрудник подполковник Владимир Сергеев.
- Товарищ генерал, просим учебный танк Т- 72. Мы готовы оборудовать его системами радиоуправления.
-Докажите целесообразность. У нас в плане этой темы нет.
- Проект - инициативный. Теория разработана. Схемы, чертежи готовы. По ним в миниатюре собрали аппаратуру, блоки и механизмы.
- Удалось ли все испытать на макете?
- На макете все работает. Пора испытывать в танке. Пошли в лабораторию. Сергеев запустил с пульта систему на
специально построенном стенде. Исполнение всех команд: запуск двигателя, переключение передач, увеличение скорости, торможение, остановки и повороты - все контролируется загорающимися лампочками. Все работает как часы. Кажется, если всю систему смонтировать на танке, то он будет прекрасно управляем. Доложили Лосику. И после обычного «давайте разберемся» получили танк Т- 72, причем он был закреплен за лабораторией.
Работы над реальными образцами радиоуправляемых танков велись долго. Все осуществлялось руками умельцев научно-исследовательской лаборатории, опытно-ремонтной мастерской.
Меня назначили куратором проекта. Его включили в план научно-исследовательской работы академии. Началось, хотя и не очень солидное, но все же финансирование. Как мог, поддерживал проект и сам Лосик. Он неоднократно принимал участие в пробных демонстрациях работы систем радиоуправления танка.
Окончательное завершение работ по проекту радиоуправляемого танка-робота состоялось, когда уже на смену Лосику пришел генерал-полковник Вячеслав Митрофанович Гордиенко. Надо отдать ему должное, он близко принял к сердцу самоотверженный труд офицеров-исследователей НИЛ-4...
В сентябре 1988 г. я лежал в госпитале по поводу предстоящего увольнения. Вдруг звонит Гордиенко:
- Николай Григорьевич, прошу вас прибыть в лагерь «Сенеж». Главком Сухопутных войск хочет познакомиться с новым детищем академии, вы будете представлять.
- Спасибо, буду!
До приезда генерала армии ЕФ. Ивановского мы успели провести несколько тренировок. Сбоев не было. Володя Сергеев до автоматизма отработал управление танком по радио с наблюдательно пункта.
Гордиенко представил Ивановскому группу разработчиков и меня как руководителя показа, потом попросил:
- Николай Григорьевич, прошу вас вначале введите нас в обстановку, потом покажите действия танка на местности.
Выслушав вводный доклад, Ивановский задал несколько вопросов, в том числе поинтересовался, реально ли управлять машиной в сорок тонн по радио и зачем вообще это надо? Он сам подошел к танку, убедился, что внутри экипажа нет, и разрешил приступать к показу.
- Откуда вы будете управлять? - спросил он Сергеева. - Я буду возле вас!
Сергеев взял в руки пульт, повернул рычажок, и тут же заурчал, ожил двигатель сорокатонной машины. Еще движение-и танк плавно тронулся. Переключались передачи, и машина быстро набирала скорость. Приблизившись ко рву, танк снизил скорость и плавно перемахнул через него. Затем танк разрушил барьер из бревен и взобрался на солидной высоты бугор. Сергеев умело управлял танком. Несколько раз по требованию главкома глушили и вновь заводили двигатель.
-А теперь возвратите танк на максимально возможной скорости, - дал указание Ивановский, - и отсюда направьте его вон к той вышке! Это возможно?
Сергеев улыбается. Сегодня его день. Он демонстрирует продукт своего труда и талант соратников.
- Это можно, - говорит он, - как и многое другое! Щелкнул переключатель, и двигатель взревел. Еще движение
руки, и машина на полной скорости мчится обратно, разворачивается почти на ходу и прямиком к вышке, что стоит в полукилометре от нас. Просто фантастика!
-А можете поднять танк на железнодорожную платформу? Если можете, то гарантируете ли безопасность? - вдруг спросил Ивановский.
-Да мы, танкисты, все можем, товарищ генерал армии! - лицо Сергеева сияло от возможности еще раз показать свое детище.
- Николай Григорьевич, а вы на тренировке на платформу танк загоняли?-вполголоса засомневался Гордиенко. - Как бы чего не вышло...
Главком еще раз недоверчиво открыл люк и осмотрел танк изнутри, словно пытаясь найти спрятавшегося там механика-водителя. Сергеев опять взял пульт в руки и давай вертеть на нем какие-то рычажки и шарики. Искусно, я бы сказал, ювелирно танк подошел к аппарели, после чего плавно и точно взобрался вверх на платформу.
Танк поелозил там немного взад-вперед и, строго вписавшись в обозначенные контуры, заглушил двигатель. Раздались аплодисменты.
При разборе показа Ивановский высказал удовлетворение созданием в академии, как он сказал, «танка-полуробота».
... Открывались новые перспективы в применении танков на поле боя. Но грянула «перестройка». Началось «горе-реформирование» армии. Важнейшая фундаментальная тема, даже после успешной демонстрации танка-робота Главкому Сухопутных войск в учебном центре «Сенеж», была закрыта». (Орлов Н.Г. Сталинская бронетанковая: Из истории Военной академии бронетанковых войск. - М.: Воениздат, 2008).
Сыч Александр Михайлович (1908-2000), генерал-лейтенант, заместитель начальника ГБТУ, с 1949г. начальник танкового управления, с 1953 г. генерал-майор ИТС. В мае 1938 г. AM. Сыч был репрессирован и обвинялся в участии в военном антисоветском заговоре командарма 1 ранга И. Ф. Федько. Содержался в Бутырской и Лефортовской тюрьмах. В июне 1939г. был освобожден из-под стражи из-за недостаточности улик, восстановлен в партии и в армии.
Обучении «Осень-88» будет особо рассказано в статье Ю.П. Павлова в ближайших номерах журнала «Техника и вооружение».
По данным 38 НИМИ МО РФ, это были не танки Т-34, а САУ СУ-100. В качестве мишеней эти боевые машины едва ли не последний раз участвовали в крупных учениях Советской Армии.
Эргономика - отрасль науки, изучающая человека (или группу людей) и его (их) деятельность в условиях производства с целью совершенствования орудий, условий и процесса труда. В нашем случае внедрение результатов научно-технических достижений приводит к усложнению БТВТ, а ограниченные физиологические и психофизические возможности человека в часто возникающих в общевойсковом бою стрессовых ситуациях не позволяют эффективно применять и реализовать потенциальные возможности данных образцов военной техники. Эта проблема потребовала тщательных исследований с целью найти оптимальные решения.
В частности, во ВНИИ Трансмаш, были созданы специализированный транспортный робот СТР-1 и комплекс «Клин-1» на основе инженерной машины разграждения ИМР-2 и танка Т-72, использовавшиеся в ходе работ по ликвидации последствий аварии на Чернобыльской АЭС.
Конечно, необходимо учитывать накопившееся технологическое отставание России от передовых зарубежных стран. Однако оно не столь фатально для работ по роботизации боевой техники. По оценкам специалистов в области макроэкономики, в мире начался переход к новому «технологическому укладу». Среди ключевых его направлений называют системы искусственного интеллекта, «наукоемкое программирование», наноэлект-ронику, фотонику. А эти направления, уже развиваемые в России, непосредственно связаны с разработкой роботизированных боевых комплексов.
Для комментирования необходимо зарегистрироваться на сайте
В прошлых постах мы уже потыкали в Т-34, Pz.III и Panther. Сегодня мы рассмотрим куда более серьёзный аппарат - Tiger II. Надо сказать, что почти всё сказанное относится и к Tiger I за исключением некоторых деталей, которые, конечно, отмечены.
Устройство механизма поворота
Первое, что бросается в глаза любому заглянувшему внутрь Тигра - штурвал для поворота, похожий на руль автомобиля. Вал от штурвала уходит в здоровенный металлический короб - механизм поворота. Штурвал регулируется по высоте, для этого нужно отвернуть кран, установить нужный угол и закрутить кран. Такая регулировка даёт возможность водить танк высунув голову из люка вне боевой обстановки.

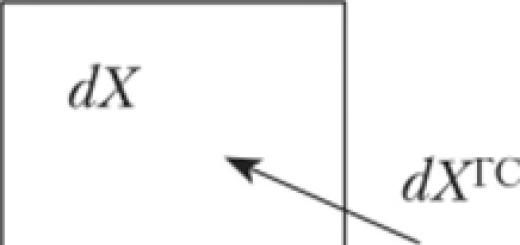
Вывод: вращая вал поворота в ту или иную сторону мы можем увеличивать скорость вращения одной гусеницы и одновременно с этим уменьшать скорость вращения второй гусеницы. Таким образом мы получаем механизм поворота дифференциального типа. При езде по прямой солнечные шестерни стремятся вращать вал поворота в противоположных направлениях, поэтому они и вал оказываются заклиненными. В этом и заключено достоинство данного принципа: в Пантере нам нужны были два тормоза, которые принудительно блокировали солнечные шестерни, а тут не нужен никакой тормоз и конструкция упрощается.
Итак, для поворота нам нужно вращать вал определённом направлении. Для этого мы добавим ещё один вал и два фрикцона поворота - левый и правый. Как следует из названия, для поворота влево мы включаем левый фрикцион. а для поворота вправо - правый. Так как вал связан с фрикционами, условно назовём его валом фрикционов.

Французский танк Somua S35 оснащён похожим по устройству механизмом поворота со схожим принципом. Интересно, что как и на Тигре мехвод Somua S35 пользуется рулём:
Данный механизм обеспечивает один устойчивый радиус поворота на каждой передаче. Механизм поворота Tiger I и Tiger II устроен сложнее, он обеспечивает два устойчивых радиуса поворота на каждой передаче. Давайте посмотрим, как это было достигнуто.
Главный поток мощности идёт через коробку передач к валу эпициклов. Второй поток мощности идёт минуя коробку передач к блоку из двух шестерён, вращающихся на оси вала поворота независимо от него. С этими шестернями связаны два фрикциона. Из-за разных передаточных чисел ведомые диски этих фрикционов вращаются с разными скоростями, поэтому фрикционы назвываются Фб (быстрый) и Фм (медленный).

Итак, вал фрикционов может вращаться с двумя разными скоростями в зависимости от того, какой из фрикционов (Фб или Фм) включается). Вал поворота может вращаться в двух направлениях (при включении Фл или Фп) с двумя разными скоростями. Это значит, что механизм поворота обеспечивает два устойчивых радиуса поворота на каждой передаче.
Прямолинейное движение
Во время прямолинейного движения штурвал находится по центру, все фрикционы механизма поворота выключены. Красным показан поток мощности к ведущим колёсам, а голубым - заклиненные шестерни и валы:

Поворот
Теперь давайте повернём вправо. Отклоним штурвал вправо на небольшой угол. Гидравлический механизм включит медленный фрикцион Фм и Фп. Здесь и далее красным обозначен главный поток мощности, а голубым - вспомогательный:

Танк начнёт медленно и плавно поворачивать вправо не теряя скорости. Если мы повернём штурвал на бОльший угол до конца, то выключится фрикцион Фм и включится фрикцион Фб, а танк начнёт поворачивать с меньшим радиусом.
Теперь давайте повернём штурвал влево на небольшой угол, выключится фрикцион Фб и Фп, включается фрикционы Фм и Фл:

Разворот на месте
Помимо множества радиусов поворота при езде вперёд механизм поворота обеспечивает разворот на месте. Для этого нужно включить нейтральную передачу, а затем повернуть штурвал влево или вправо. Возможность разворота на месте с двумя разными скоростями позволяет точно позиционировать корпус танка, что очень важно при погрузке на платформы или в тесных улицах.
Для быстрого разворота на месте против часовой стрелки включим фрикционы Фл и Фб повернув штурвал влево до упора. Вал поворота будет вращать солнечные шестерни в противоположных направлениях. Солченые шестерни, в свою очередь, станут вращать водила и связанные с ними ведущие колёса в противоположных направлениях. Водила через шестерни-сателлиты будут стремиться вращать эпициклы в противоположных направлениях. Так как эпициклы связаны валом, вал и сами эпициклы заклиниваются. Именно поэтому разворот на месте осуществляется на нейтральной передаче, ведь вал между эпициклами не должен вращаться от коробки передач. Голубым обозначены заклиненные шестерни и валы:

Резервная система управления
Все четыре фрикциона механизма поворота управляются гидравлической системой. Благодаря этому механизм поворота вообще не нуждается в регулировке в процессе эксплуатации. Так как штурвал связан с гидравлической системой, его легко поворачивать (конечно, по танковым меркам). В СССР испытывались танки разных стран с точки зрения усилий на рычагах и штурвалах при вождении. Так вот, Jagdtiger с механизмом поворота от Tiger II оказался самым простым и удобным в управлении, а усилия на штурвал были наименьшими. Вот ссылка на результаты замеров, убедитесь сами .
Механизм поворота со снятой крышкой:
Но что делать, если гидравлическая система выйдет из строя? В этом случае штурвал станет бесполезным, а фрикционы перестанут включаться. На этот случай предусмотрена резервная система. Посмотрите ещё раз на схемы выше. Видно, что к выходящим из механизма поворота валам приделаны тормоза. Слева и справа от штурвала находятся два рычага, которые и управляют этими тормозами. В штатной ситуации при исправном штурвале рычаги используются для торможения. Если же гидравлика выйдет из строя, то эти же рычаги используются для поворота танка.
Если мы повернём левый рычаг, то левый вал начнёт тормозиться и левая гусеница станет вращаться медленнее. Так как правый тормоз выключен, левый вал вращать труднее, чем правый, поэтому вал поворота и солнечные шестерни расклиниваются и начнут вращаться, увеличивая скорость вращения правой гусеницы. Конечно, этот способ обеспечивает только один устойчивый радиус поворота и потери мощности будут выше, но в случае неисправности Тигр может своим ходом без проблем доехать до ремонтной базы.
Устойчивость движения
На танках VK 36.01 (H) и Tiger I ставился механизм поворота Henschel L 600 C. Собственно, схему и принцип работы этого Lenkapparat"а я выше и описал. При всех своих достоинствах он имеет один недостаток: не обеспечивается устойчивое движение при езде по прямой. То есть когда Tiger I едет по асфальту и сопротивление движению на левой и правой гусенице одинаковое, танк едет строго вперёд и никаких проблем нет. Но если Tiger I едет по бездорожью и сопротивление движению на левой и правой гусеницах отличается, их скорость меняется из-за расклинивания вала поворота и танк немного уводит в сторону. Вообще, неустойчивое прямолинейное движение - это проблема практически всех механизмов поворота дифференциального типа тех лет. Она есть, в частности, на M3 Lee, M4 Sherman, Churchill, Cromwell, Comet, Centurion и так далее.
На Panther II, Tiger II и E-100 ставился механизм поворота Henschel L 801. Он имеет точно такую же схему, как L 600 C и сходное устройство, но важное отличие. При езде по прямой фрикционы Фл и Фп были постоянно включены. Благодаря этому вал поворота принудительно заклинивался и обеспечивал устойчивое прямолинейное движение. Для поворота влево отключался фрикцион Фп, а вправо - Фл соответственно. Таким образом механизм поворота L 801 объединял достоинства независимых и дифференциальных механизмов поворота. Его схема была настолько удачна, что именно L 801 был выбран для Tiger II и Panther II в ходе унификации, а когда после войны немцы начали работу над Leopard I, в его механизме поворота использовалась эта же схема в другом исполнении под кормовое расположение трансмисии.
Оценка
Мы рассмотрели устройство механизма поворота и принцип управления штурвалом. Теперь мы можем сравнить его с другими двухпоточными механизмами поворота тех лет: с независимым механизмами поворота Panther и с дифференциальным механизмом поворота Centurion.
Достоинства:
- Удобство и лёгкость управления
- Наличие резервной системы управления. На Panther необходимо блокировать солнечные шестерни тормозами, если тормоза выйдут из строя, танк потеряет управляемость. На Тигре можно убить все четыре фрикциона и доехать до ремонтной базы своим ходом
- На Centurion поворот осуществляется ленточными тормозами, а на Тигре фрикционами с гидравлическим приводом, который не требует регулировки
- Наличие двух радиусов устойчивого поворота вместо одного на Panther и Centurion
- Высокое качество исполнения и надёжность в работе. Это относится даже к Tiger II позднего выпуска. Трансмиссия Пантеры имеет меньше резервы из-за слабых узлов (бортовые передачи, фрикционы поворота)
- В отличие от Centurion, обеспечивается устойчивость прямолинейного движения
- Значительные габариты механизма поворота, особенно по сравнению с компактностью аналогов на Panther и Centurion
- Сложность устройства (четыре фрикциона, три вала дополнительного привода, гидравлическая система управления и т.д.) Centurion выгодно выделяется наиболее простым устройством
- Для компоновки такого механизма поворота в танке с кормовым расположением трансмиссии приходится переделывать реализацию в сторону усложнения (на Leopard I для достижения компактности пришлось применить множество вложенных друг в друга валов)